
Von der Flosse zur Hand
Hand, Pfote, Flügel und Elefantenfuss: Sie gehen auf dieselbe Fischart zurück, die vor über 375 Millionen Jahren das Land eroberte.

Veröffentlicht am 7. Oktober 2013 - 11:58 Uhr

Tippt ein Mensch auf einer Schreibtastatur, schafft er bis zu 750 Anschläge pro Minute. Ein virtuoser Pianist schlägt die Tasten sogar doppelt so schnell an, bis zu 24-mal pro Sekunde. So flinke Bewegungen sind nur möglich, weil unsere Finger dank ihrem raffinierten Aufbau äusserst beweglich sind. Müssten wir jede ihrer Bewegungen bewusst steuern, wäre unser Hirn komplett überlastet. Doch die Sehnen auf der Handinnen- und Handaussenseite halten die Finger ständig unter Spannung. Schlagen wir eine Taste an, müssen wir den Finger nur krümmen – danach schnellt er wie von einem Gummiband gezogen zurück in die Ausgangslage.

Unsere Hand ist nicht nur sehr beweglich, sie ist auch enorm empfindsam. Druckrezeptoren auf den Fingerkuppen ermöglichen es, ein Ei zu ergreifen, ohne es zu zerdrücken. Nur auf den Lippen und der Zunge befinden sich noch mehr von diesen Nervenzellen.
Die menschliche Hand ist ein wahres Multifunktionswerkzeug, und ihre Fähigkeiten erscheinen noch erstaunlicher, wenn man bedenkt, dass sie denselben Ursprung hat wie der Fuss des Elefanten oder der Flügel der Fledermaus.
Die Urform von Hand, Fuss und Flügel ist eine Flosse. Sie ist über 375 Millionen Jahre alt und wurde 2004 vom Paläontologen Neil Shubin entdeckt. Der US-Amerikaner verbrachte seine Sommerferien nördlich des Polarkreises und suchte in der kanadischen Arktis nach Fossilien. Er stiess auf ein bis dahin unbekanntes, versteinertes Tier. Es erhielt den Namen Tiktaalik, der in der Sprache der in der Region lebenden Inuit einen grossen Süsswasserfisch bezeichnet.
Das Tier hatte einen flachen Kopf mit Augen auf der Oberseite, Schuppen auf dem Rücken, einen kurzen Hals, und es atmete durch Kiemen. Es war ein Mittelding zwischen Fisch und Reptil, das aus einer Zeit stammt, als noch die gesamte Fauna des Planeten im Wasser lebte.
Als Neil Shubin die auffällige vordere Flosse genauer untersuchte, machte er eine sensationelle Entdeckung, die den Tiktaalik auf die Titelseiten der «New York Times» und der «Washington Post» brachte: In der Flosse steckte die Grundform eines Arms. Shubin sah Schulter, Oberarm, Ellenbogen, Unterarm, Handgelenk und Ansätze von Fingern. Dank diesen Knochen konnte sich Tiktaalik im seichten Wasser fortbewegen und den Kopf über Wasser halten. «Tiktaalik war zu Liegestützen fähig», schreibt Neil Shubin in seinem Buch «Der Fisch in uns».
Doch damit nicht genug: Als vielleicht erstes Tier überhaupt konnte der Urahn der Lungenfische das Meer verlassen und an Land kriechen. Mit seinen Extremitäten, die in der Entwicklungsgeschichte ein Novum darstellten, konnte er sich auf festem Boden vor Raubfischen in Sicherheit bringen. Ein kleiner «Schritt» für Tiktaalik, ein grosser für die Tierwelt. Warum die Zahl der – zumindest in der Anlage vorhandenen – sechs, sieben oder acht Finger während der Jahrmillionen abnahm und sich die meisten Tiere auf fünf beschränkten, ist der Wissenschaft noch heute ein Rätsel.
Tiktaalik ist der versteinerte Beweis für den Irrtum des schottischen Anatomen Charles Bell. 1833 vertrat er in seiner Abhandlung über den Aufbau der menschlichen Hand die Ansicht, die perfekte Anatomie der Hand müsse göttlichen Ursprungs sein. 30 Jahre später widerlegten Charles Darwin und Alfred Russel Wallace diese verklärte Sicht. Nicht eine göttliche Kraft habe die Hand geformt, sondern die Evolution, lautete ihr Befund. Mit der Flosse des Tiktaalik existiert der Beweis für eine evolutionäre Entwicklung der Hand. «Aus einem erfolgreichen Bauplan sind unterschiedliche Extremitäten entstanden», sagt der Evolutionsbiologe Walter Salzburger von der Universität Basel.
Der Tiktaalik ist der gemeinsame Vorfahr aller Wirbeltiere mit Gliedmassen. Aus seiner Urhand entwickelte sich über mehrere hundert Millionen Jahre perfektes Flug-, Geh-, Kletter- und Greifwerkzeug. Vögel bildeten Flügel, Fledermäuse eine langfingrige, mit einer Flughaut überspannte Hand und andere Säugetiere sowohl vordere wie auch hintere Extremitäten. Äusserlich sehen all diese Gliedmassen höchst unterschiedlich aus. Katzenpfote, Fledermausflügel und Elefantenfuss scheinen nichts gemein zu haben. Doch unter der Haut verbirgt sich bei allen der Bauplan von Tiktaaliks Flosse: ein grosser Knochen, der Oberarm, zwei parallele Knochen, der Unterarm, viele kleine Knöchelchen, das Handgelenk und schliesslich Finger oder Zehen.
Im Verlauf der Evolution vergrösserten sich manche Knochen, andere wurden kleiner, und das Zusammenspiel der Bauteile für die Bedürfnisse der verschiedenen Tierarten perfektionierte sich. Beim Tiktaalik ist die Grundstruktur der Hand mit Handgelenk, Handfläche und Fingern bereits zu erkennen. Rund zehn Millionen Jahre später bildeten Amphibien die ersten Zehen aus. Die ältesten voll ausgestatteten Füsse mit Gelenkknochen finden sich bei 250 Millionen Jahre alten Reptilien. Erst Millionen von Jahren später verfügte der Uraffe über eine Greifhand.
Primaten haben im Vergleich zum Menschen längere, weniger stark gekrümmte Finger, kleinere Daumen und grössere Handflächen. Ihre Hände sind so beschaffen, dass sie in Bäumen herumklettern können. Obwohl manche Affenarten über die Fähigkeit verfügen, den ersten Zeh dem anderen gegenüberzustellen, brauchen Primaten nur vier Finger der Hand, um sich mit einem sogenannten Hakengriff an Ästen festhalten zu können. Der Daumen spielt dabei kaum eine Rolle. Was diesen Finger betrifft, darf man Homo sapiens getrost als Krone der Schöpfung bezeichnen.
Nur beim Menschen ist der Daumen gegenüber den anderen Fingern um 130 Grad gedreht. Das erlaubt uns, den Daumen den Fingern gegenüberzustellen. Diese als Opposition bezeichnete Stellung ermöglicht einen kraftvollen Faustgriff, mit dem wir zum Beispiel Werkzeug festhalten können.
«Wichtig für die Beweglichkeit unserer Hand war die Verfeinerung des Daumensattelgelenks», sagt Walter Salzburger. Dieses Gelenk an der Basis des Daumens gleicht zwei aufeinanderliegenden Sätteln und ermöglicht dem Daumen maximale Beweglichkeit bei gleichzeitiger Stabilität.
Deshalb sind wir Meister des Präzisionsgriffs. Mit den Kuppen von Daumen, Zeige- und Ringfinger greifen wir zum Beispiel beim Schreiben gefühlvoll zu. Wir spüren sofort, was wir in Händen halten, und dosieren die Kraft. Kein Tier hat seine Vorderextremitäten derart souverän im Griff.
Erst nachdem unsere Vorfahren den aufrechten Gang erlernt und die Arme frei hatten, konnte sich die Hand zum perfekten Werkzeug entwickeln. Und zu einer Waffe: Finger und Daumen rollen sich in der Handfläche zur Faust.
Namhafte Evolutionsbiologen wie der Amerikaner Richard Young sind deshalb der Meinung, dass aggressive Handlungen die Entwicklung der Hand vorwärtsgetrieben haben. Wer erfolgreich Tiere jagen und Widersacher niederschlagen konnte, setzte sich durch und hatte mehr Nachkommen. Faust- und Präzisionsgriff sind nach dieser Theorie das Resultat von Überlebensstrategien und Konkurrenzkämpfen.
Ob aggressives Verhalten bestimmend war oder nicht: Sicher ist, dass Feinmotorik und Tastempfindung der Hand auf dem Weg zum Homo sapiens perfektioniert werden mussten. Das Gehirn bildete kontinuierlich neue Nervenverbindungen mit den Muskeln und Sehnen der Hand und stärkte deren Empfindung. Die Kontrolle der Hand beansprucht im Vergleich zu anderen Körperteilen einen überproportional grossen Teil der Grosshirnkapazität. Das ermöglicht schnelle und präzise Bewegungen und Tastempfindungen.
Evolutionsbiologen sehen in der neuronalen Komplexität der Handsteuerung die Voraussetzung für andere Höchstleistungen des Menschen, etwa der Sprache. Hand und Hirn entwickelten sich in gegenseitiger Abhängigkeit, die Hand wurde zum wichtigsten Partner des Hirns, das an Intelligenz zulegte. Neil Shubin sagt: «Wenn ich eine Hand sehe, erblicke ich den Inbegriff des Menschlichen.»
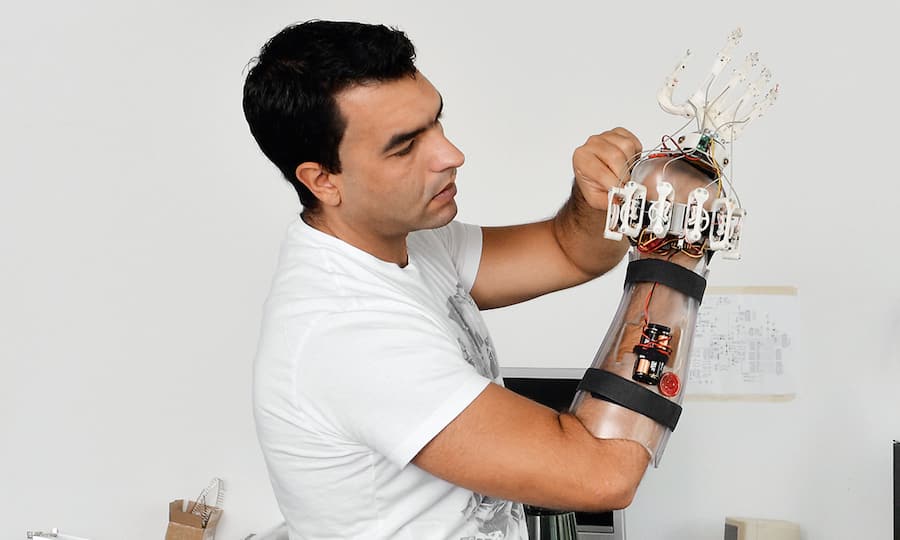
Konstantinos Dermitzakis baut an der Universität Zürich eine Roboterhand. Kopieren kann er das Vorbild nicht, aber viel von ihm lernen.
BeobachterNatur: Konstantinos Dermitzakis, wird man jemals mit einer künstlichen Hand Klavier spielen können?
Konstantinos Dermitzakis: Natürlich. Die Frage ist nur: zu welchem Preis?
BeobachterNatur: Wie meinen Sie das?
Konstantinos Dermitzakis: Man muss viele «Muskeln», also Motoren einbauen und sehr präzis steuern. Das macht die Prothese schwer und sorgt für horrenden Energieverbrauch. Zum heutigen Stand würde ich sagen: Es wäre möglich, aber zum Preis, dass nach einer Viertelstunde die Batterie leer ist.
BeobachterNatur: Seit sechs Jahren bauen Sie an einer Roboterhand, die als Prothese verwendet werden soll. Gibt es nicht schon genug Handprothesen auf dem Markt?
Konstantinos Dermitzakis: Die State-of-the-Art-Handprothese kostet mehrere zehntausend Franken. Und was kann sie? Gerade mal die Hand öffnen und schliessen über Motoren, die in der Handfläche sitzen. Das ist schon knifflig genug, schliesslich kann man nicht jeden Gegenstand gleich fest ergreifen.
BeobachterNatur: Und es geht sicher noch komplizierter.
Konstantinos Dermitzakis: Natürlich. Aber da versagt die Prothese. Wenn der Daumen in einer anderen als der Standardstellung gebraucht wird, muss man ihn mit der gesunden Hand in die richtige Stellung bewegen. Praktisch ist das nicht. Auf lange Sicht legt die Hälfte der Prothesenträger ihren Roboterarm wieder ab.
BeobachterNatur: Sie lassen sich von der Biologie inspirieren, um eine möglichst funktionale Hand zu bauen.
Konstantinos Dermitzakis: Mutter Natur hat einen sehr guten Job gemacht. Warum sollte die Biomechanik nicht einfach das nutzen, was sich über Jahrtausende als das beste System erwiesen hat? Wir wollen aber nicht einfach so gut wie möglich die Natur kopieren. Es geht darum, zu verstehen, wieso die Dinge so funktionieren, wie sie es tun, und dann zu sehen, wie man das in der Robotik umsetzen kann.
BeobachterNatur: Was können Sie dafür vom Anatomiebuch abschauen?
Konstantinos Dermitzakis: Ein Beispiel: Drehen Sie Ihre Hand mit dem Handrücken nach oben und lassen Sie die Finger locker hängen. Sie werden feststellen, dass sich die Finger automatisch in einem Punkt treffen. Und wenn Sie die Handfläche drehen, sorgt ein schlichter Federmechanismus aus Muskeln und Sehnen dafür, dass sie sich wieder zurückdreht. Das Material übernimmt die Kontrolle. Wenn das Gehirn jede Bewegung steuern müsste, bliebe kaum Kapazität zum Denken übrig.
BeobachterNatur: Wahrscheinlich haben Sie mittlerweile mehr über die menschliche Hand gelernt, als Sie je wissen wollten.
Konstantinos Dermitzakis: Ich habe mir sogar einen Finger besorgt, den ich sezieren durfte. Die Hand ist extrem kompliziert aufgebaut. Es braucht 39 Muskeln, um sie zu steuern.
BeobachterNatur: Weil sie sehr beweglich ist.
Konstantinos Dermitzakis: Genau. Jeder Finger hat vier Bewegungsmöglichkeiten. Eine ist die Seitenbewegung des Fingergelenks zwischen Mittelhandknochen und Mittelhand. Und dann kann man jeden Finger noch an drei Gelenken beugen. Der Daumen hat fünf Bewegungsmöglichkeiten. Das addiert sich zu 21 «Freiheitsgraden», wie die Ingenieure sagen. Unmöglich, das alles über Motoren einzeln anzusteuern.
BeobachterNatur: Was bedeutet das für die Roboterhand?
Konstantinos Dermitzakis: Wir mussten uns überlegen, was wir weglassen können. Würden wir die Zahl der Muskeln exakt abbilden, würde deren Kontrolle eine äusserst komplexe Software erfordern.
BeobachterNatur: Wie erhält man mit möglichst wenig Rechenleistung natürlich aussehende Bewegungen?
Konstantinos Dermitzakis: Extrem kontrollierte Bewegungen sehen nie natürlich aus. Das kann man beim berühmten Roboter Asimo beobachten. Jeder seiner Schritte ist bis ins Detail kontrolliert. Jede Millisekunde seines «Lebens» sagt ihm ein Mikroprozessor, was er tun soll. Auf diese Art kann die Bewegung niemals fliessend erscheinen.
BeobachterNatur: Gibt es eine Alternative?
Konstantinos Dermitzakis: Die Natur handhabt das viel einfacher: Das Gehirn erteilt einem Muskel den Befehl, sich anzuspannen. Ein Grossteil der Bewegung erfolgt dann rein mechanisch durch das Zusammenspiel von Muskeln und Sehnen. Wir versuchen das in der Robotik umzusetzen. Die Roboterhunde an unserem Institut haben im Knie eine simple Feder, die das Bein rein mechanisch zurückknicken lässt, wenn es angehoben wird. Ihr Gang sieht recht natürlich aus.
BeobachterNatur: Worauf kommt es bei der Hand an?
Konstantinos Dermitzakis: Wir versuchen, so viel Intelligenz wie möglich in die Bauteile selbst zu bekommen. Die Kunststoffknochen der Finger sind an der Unterseite nach innen gewölbt wie beim anatomischen Vorbild. So lassen sie sich gut zum sogenannten Kraftgriff ballen, mit dem wir Gegenstände hochheben. Leicht gebogene Knochen nutzen die Kräfte besser, die beim Heben wirken, und unterstützen so das Zusammenballen der Finger.
BeobachterNatur: Leicht gebogene Knochen machen die Finger also stärker?
Konstantinos Dermitzakis: Genau. Ausserdem gewinnen wir durch die ausgesparte Wölbung Platz für «Fleisch», in unserem Fall für Sensoren und Kabel.
BeobachterNatur: Was haben Sie noch der Natur abgeschaut?
Konstantinos Dermitzakis: Ein Grossteil der Muskeln, die die Hand steuern, liegt im Unterarm. Sie schicken Impulse über Streck- und Beugesehnen in die Hand, wo sie die Finger öffnen und zusammenziehen. Bei uns sitzen die Motoren für die Finger ebenfalls auf dem Unterarm. Sie bewegen die Finger über eine Art Seilzüge, die den Sehnen entsprechen. Das spart eine Menge Gewicht in den Fingern selbst. Und das System bringt uns einen weiteren Vorteil: die Reibung.
BeobachterNatur: Wirkt die Reibung nicht gegen die Bewegung und schluckt unnötig Energie?
Konstantinos Dermitzakis: Ja, darum wollen Ingenieure Reibung normalerweise vermeiden. Auch im Roboterbau. Wir haben aber festgestellt, dass sie uns hilft, Energie zu sparen. Dank Reibung kann ich die Hand mit weniger Energieaufwand geschlossen halten. Bei der menschlichen Hand macht diese Reibungskraft zehn Prozent der statischen Fingerhaltekraft aus. Fledermäuse können ihre Sehnen sogar derart verzahnen, dass sie nur aufgrund der Reibung ihr Körpergewicht tragen können. So können sie hängend schlafen und bleiben selbst dann hängen, wenn sie tot sind. Wir sind bisher die Einzigen, die den Ansatz mit der Reibung für eine Roboterhand nutzen. Da schlummert noch eine Menge ungenutztes Potential.
BeobachterNatur: Wie steuert man eigentlich eine Handprothese?
Konstantinos Dermitzakis: Klassischerweise werden Elektroden auf die noch vorhandenen Muskelstränge aufgeklebt. Zwei Sensoren pro Muskel messen die Ströme, die beim Anspannen oder Lockern wahrnehmbar sind, und leiten diese Signale an die Steuerungseinheit weiter. Das Prinzip ist seit den sechziger Jahren dasselbe. Nur braucht das viel Übung, und am Ende funktioniert es doch nicht besonders gut.
BeobachterNatur: Wo hakt es denn?
Konstantinos Dermitzakis: Die Signale werden beeinflusst davon, ob der Arm haarig ist oder glatt, ob der Träger vor einer oder vor fünf Stunden geduscht hat, ob er müde ist, ob er schwitzt. Zudem kleben die Sensoren nach spätestens vier Stunden nicht mehr gut und müssen ersetzt werden. Und die neuen müssten an exakt denselben Stellen kleben, was in der Praxis nicht möglich ist. Deshalb muss alles jedes Mal neu kalibriert werden. Das System ist enorm störanfällig. Ausserdem ist das, was die Sensoren aufzeichnen, nicht immer leicht zu deuten.
BeobachterNatur: Wie muss ich mir die aufgezeichneten Signale vorstellen?
Konstantinos Dermitzakis: Da sind wir beim nächsten Problem. Die Sensoren zeichnen viel «noise» auf, also Rauschen, das man herausfiltern muss. Das Ganze ist in etwa so sinnvoll, als hielte ich ein Mikrophon an einen Motor, um zu messen, wie schnell er läuft. Die beste Methode wäre, Sensoren direkt in den Muskel zu pflanzen, um das Rauschen zu vermeiden und ein klares Signal zu erhalten. Aber wegen der Infektionsgefahr kommt das nicht in Frage.
BeobachterNatur: Gibt es eine andere Lösung?
Konstantinos Dermitzakis: Warum nicht einfach das nutzen, was einem Handamputierten immer noch bleibt, nämlich die Drehbewegungen des verbliebenen Armstumpfs? Ein Sensor am künstlichen Handgelenk könnte sie messen und daraus Gesten ableiten, die wir in einer Softwarebibliothek ablegen. Damit wären 97 Prozent Trefferquote bei bisher 22 Bewegungen möglich, etwa: Hand öffnen, schliessen, auf etwas zeigen. Das Ganze würde intuitiv funktionieren und bräuchte kaum Trainingszeit.
BeobachterNatur: «Könnte», «würde» – wo hapert es noch?
Konstantinos Dermitzakis: Weil der Kontext jeder Bewegung bekannt sein muss, liefe irgendwann die Softwarebibliothek aus dem Ruder. Dabei ginge es gerade darum, Rechenleistung einzusparen, um die Steuerung so simpel wie möglich zu halten und Energie zu sparen. Nehme ich zum Beispiel eine Kreisbewegung, um anzuzeigen, dass ich die Hand öffnen will, funktioniert das prinzipiell bereits. Aber was, wenn ich gerade ein volles Glas in der Hand halte, das ich abstellen will? Aktuell sind wir so weit, dass wir mit einem Sensor die Grobbewegung auslösen können. Die Feinbewegung wird dann konventionell gesteuert.
BeobachterNatur: Was sind Ihre nächsten Ziele?
Konstantinos Dermitzakis: Wir wollen Bewegungen für den Armstumpf finden, die in einem Kontext zu dem stehen, was sie bewirken sollen. Dann könnte die Prothese aus natürlichen Bewegungen erkennen, was sie tun soll, der Träger bräuchte keine speziellen Gesten zu machen. Und ich habe ein weiteres Ziel: 10 000 Sensoren pro Fingerspitze, wie bei der menschlichen Hand, wird die Prothese zwar nie bekommen, aber es wäre schon nützlich, dem Träger motorisches Feedback zu geben, damit er weiss, was die Prothese «fühlt».
Konstantinos Dermitzakis, 29, hat in Edinburgh einen Bachelor in Computerwissenschaften und einen Master in Artificial Intelligence erworben. Seit 2007 arbeitet er als Doktorand bei Professor Rolf Pfeifer am Artificial Intelligence Lab der Universität Zürich. Er steht kurz vor dem Abschluss seiner Prüfungen und wird danach als Forschungsassistent weiter an seinem Projekt arbeiten.